



Trong các kịch bản bảo mật, thiết bị giám sát thường được tiếp xúc với gió - dao động gây ra do dài - cài đặt khoảng cách. Trong khi máy ảnh rộng - Chế độ góc cho thấy độ nhạy tối thiểu đối với các rối loạn bên ngoài, Chế độ tele quang học khuếch đại các rung động cơ học, dẫn đến mờ hình ảnh đáng kể hoặc thậm chí mất tiêu điểm mục tiêu. Do đó, cơ chế ổn định hoạt động đã nổi lên như một yêu cầu kỹ thuật quan trọng cho các hệ thống giám sát phạm vi dài. Các công nghệ ổn định hiện tại chủ yếu thuộc hai loại: Ổn định hình ảnh quang học (OIS) Và Ổn định hình ảnh điện tử (EIS).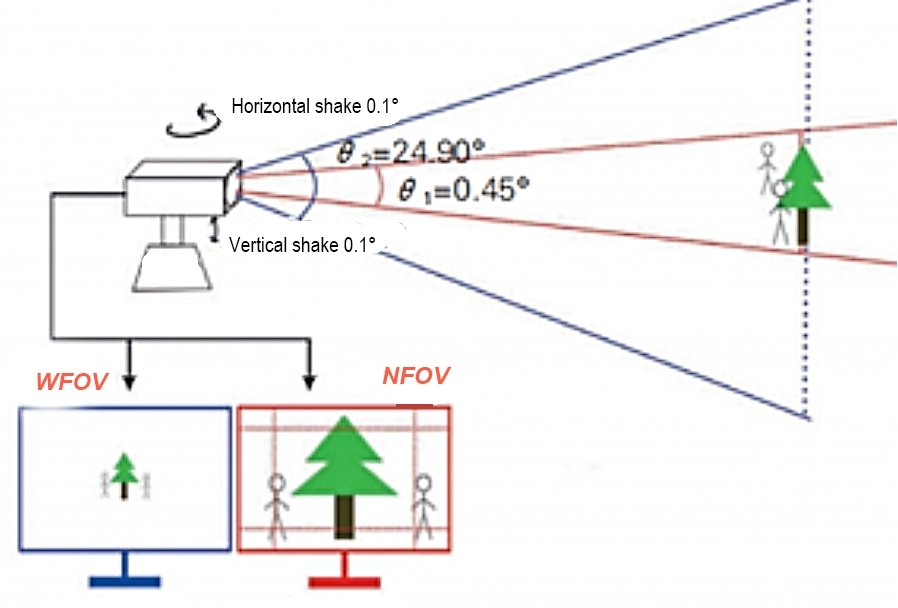
EIS sử dụng một bài đăng hình ảnh - Thuật toán xử lý để đạt được sự ổn định hình ảnh. Nó đòi hỏi ảnh hiện tại phải được mở rộng, dẫn đến mất 10% - 20% của trường giám sát. Trong công nghệ EIS, ống kính chỉ chịu trách nhiệm thu nhận hình ảnh. Sau khi cảm biến tạo thành một hình ảnh, trước tiên nó phải được ổn định hình ảnh bằng thuật toán lõi của bộ xử lý hình ảnh, và sau đó video được nén và truyền. Loại ổn định hình ảnh này hoàn toàn đạt được thông qua công nghệ xử lý kỹ thuật số, giúp giảm chất lượng video và có hiệu ứng ổn định chung. Nó thường được sử dụng trong các sản phẩm thấp - cuối do lợi thế chi phí của nó.

OIS sử dụng một con quay hồi chuyển trong lắp ráp ống kính để phát hiện các rung động của camera. Con quay hồi chuyển chuyển đổi dữ liệu chuyển động cơ học thành tín hiệu điện được truyền đến bộ điều khiển OIS. Bộ xử lý trung tâm của bộ điều khiển phân tích ngay lập tức và tính toán độ dịch chuyển hoặc góc mà ống kính cần phải bù và sử dụng lực điện từ được tạo ra bởi ba bộ cuộn dây và nam châm thông qua động cơ truyền động để điều khiển ống kính chính xác để nghiêng, điều chỉnh đường dẫn quang và tránh làm mờ hình ảnh do lắc. Trong thiết kế quang học, bằng cách thêm một ống kính có thể di chuyển, sự thay đổi của ống kính được điều khiển dựa trên lượng lắc, bù đường dẫn quang trở lại trạng thái ổn định.
Trong mỗi chu kỳ phơi sáng, OIS phải thực hiện tuần tự: phát hiện rung, xử lý tín hiệu và truyền động ống kính bù. Toàn bộ quá trình là chuyển động servo, cũng có các đặc điểm của thời gian phát hiện ngắn, tốc độ xử lý tín hiệu nhanh, chuyển động bù ống kính nhỏ và áp dụng thuật toán điều khiển PID đơn giản và tương đối ổn định.